Pax7
LifeOn2 Development
Hello All,
I posted the below analysis over at iRacing the other day, and I thought I'd repost it here for anybody not a member over there:
------------------------------
With ISI releasing the Skip Barber formula car, there is opportunity to compare rFactor2 with iRacing using reasonably similar input. In this post I take a look at the FFB output characteristics of the rFactor2 Skip Barber Regional and compares it to the iRacing Skip Barber RT2000. Both are driven at Lime Rock Park.
The main purpose of this comparison is to try to demonstrate the rather different FFB output of iRacing (iR) and rFactor2 (rF2) respectively. The difference in feeling is substantial, and it is demonstrated below. In addition to videos, I will also analyze telemetry output from the video recorded runs to try to further shed some light on what is happening and why.
All tests were carried out using a Leo Bodnar wheel (with a Frex paddle shifter unit attached). The FFB output of the sims are set not to clip. Unfortunately it is not really possible to have a 1:1 match of the effective FFB output to the wheel from iR and rF2 respectively. I did however try to set the FFB torque output so that the generated torque going through corners were of close enough magnitude. The caster of the cars were set to 5.0 (rF2) and 5.2 (iR) degrees.
In iR, "use linear mode" is enabled, FFB strength = 7.0, damping = 0%, min force = 0.0%. Baseline setup is used.
rF2 has a rich set of FFB customization options, so I will not list them all here. I have used the default settings (except for "steering torque per-vehicle mult="0.65000"" and where noted), which are in fact mostly aimed for fidelity. The default setup was used for the rF2 Skip Barber. The "steering torque per-vehicle mult" was reduced from 1.0 to prevent FFB clipping. Unfortunately, in rF2 it is not possible to check for clipping like in iR, so 0.65 is a safe-side guess really. Little known btw is that also rF2 has the ability to control the (linearity) function of the FFB output, but the function is AFAIK not known. The parameter that regulates it is "steering torque sensitivity".
So, with those preliminaries out of the way, let us get going!
First, we take a look at how the Skip Barber behaves in rF2 when going in a straight line without the driver holding the steering wheel:
We can observe a few things in the video:
* It takes about 1.5 seconds from wheel release until the wheel starts to oscillate.
* The oscillation has a ~fixed steady state frequency and magnitude.
The reason for the very start of the oscillation is road bumps, but why does the steady state oscillation occur at all? Is it the way it is supposed to be (at least from how rF2 is designed), or is the oscillation a result of that the rF2 FFB output and steering wheel position sampling rates are not fast enough to stabilize the steering (by the self aligning torque effect)?
To analyze that and come up with a plausible answer, I will have a look at the telemetry data for the above oscillation.
But first, for comparison, I utilized the rF2 capability to enable a host of different canned effects. I chose to enable the static centering spring effect, which is sent to the FFB wheel controller once and the spring effect is then controlled at a high loop rate by the FFB wheel controller itself. (Only Leo Bodnar can in this case answer the question of at exactly how high loop rate") )
)
I used the following centering spring settings:
* spring coefficient="0.20000" // Static spring effect rate (-1.0 to 1.0)
* spring saturation="1.00000" // Static spring effect peak force (0.0 to 1.0)
The comments give reasonable information on the function of each parameter. The coefficient determines the rate of change (the gradient) in force as a function of the distance the wheel has traveled from spring center. The saturation determines the fraction of maximum force the centering spring effect is allowed to output. These descriptions of course only are true provided the centering spring effect is implemented according to the USB-IF recommendation in the FFB controller.
The choice of spring parameter values were not carefully chosen for the test; When looking at them now I think they can easily be set for better results. Here is anyway a video with the above spring parameters set:
We can see that the Bodnar wheel is capable of centering the wheel nicely and prohibit oscillation.
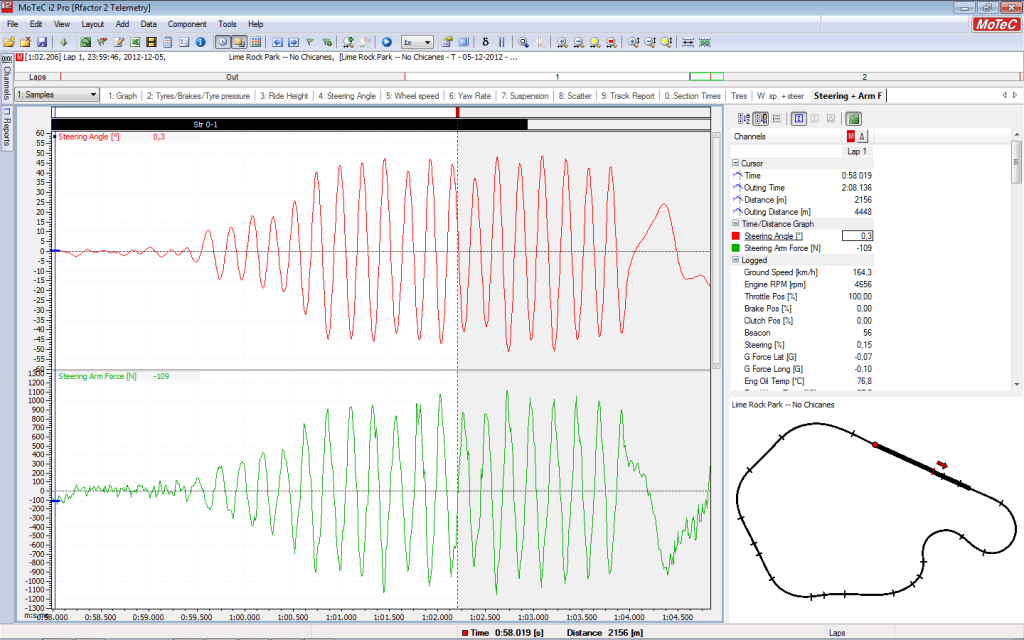
Let us now take a look at the telemetry output of the oscillation sequence from the first video (click for larger size):
* Steering angle > 0 is right turn
* Steering arm force > 0 is pulling the wheel right

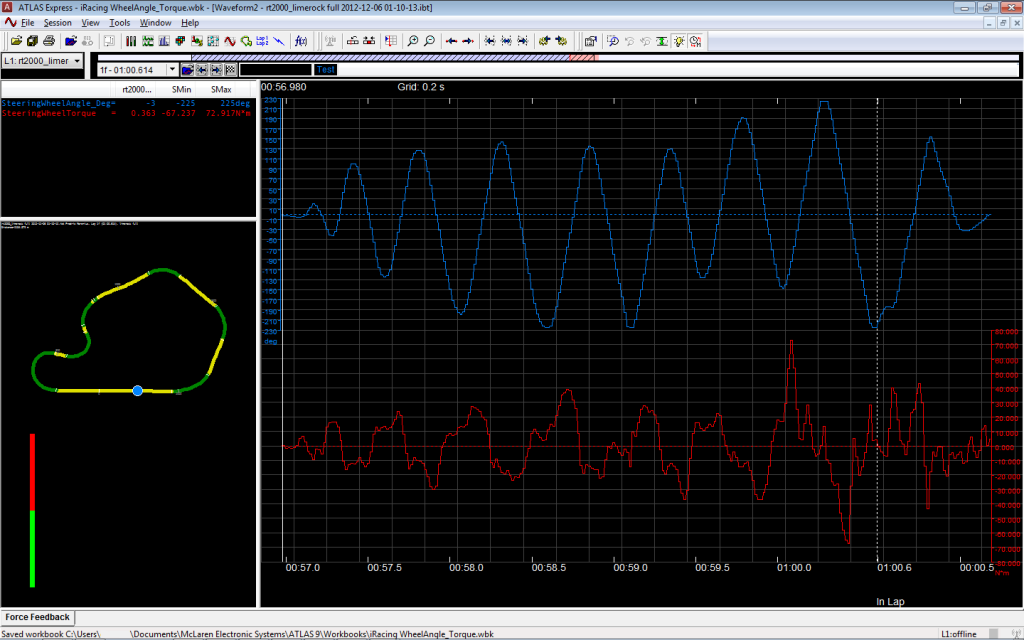
We see that the frequency of the oscillation is pretty constant from start, but that it takes around 1.5 second for it to reach its steady state magnitude. To better be able to analyze, here is a detail view of the last part of the oscillation (click for larger size):

We can observe a few basic things:
* The oscillation period is ca. 0.25 seconds (4 Hz)
* The time from zero to peak steering is ca. 63 ms.
As the FFB output and steering wheel position sampling is done @400 Hz in rF2 (once every 2.5 ms), it means rF2 is able to read out steering wheel position and update the FFB output around 25 times while the steering wheel goes from zero to peak steering angle in the above oscillation. That means there is plenty of time for the simulator to have the car behave in an orderly fashion.
So, as it seems the oscillation is according to an ordered state of the sim physics modelling, what happens is probably that the kinetic energy accumulated due to the weight of the car and the fact that it is turning (=accelerating) makes the steering swing over the center from one side to the other. The side forces eventually stops the swing in one direction and starts it in the other. The magnitude of the self aligning torque of the front wheels as a function of steered angle is not enough to counteract this to keep the steering wheel more centered. ...Hm, any proper vehicle dynamics knowledgeable is welcome explain this better...
Now, let us take a look on how the iR Skip Barber behaves in the same situation as in the first video above:
Observations:
* The wheel goes into large magnitude oscillation immediately after wheel release
* The magnitude of the oscillation does not increase very much after start. Also the frequency seems relatively constant.
Here is telemetry output of the oscillation sequence (click for larger size):
* Steering angle > 0 is left turn (opposite of rF2)
* Steering wheel torque > 0 is pulling the wheel left (consequently, opposite of rF2)

Observations:
* The time to full magnitude is indeed lower than in rF2. In iR it is slightly less than one second.
* The steering angle magnitude bottoms out at 225 degrees (the wheel is set to 450 degrees lock-to-lock range). In rF2, the magnitude is smaller, around 50 degrees.
* The oscillation period is ca. 0.5 seconds (2 Hz). Notice here though that left and right oscillations are not equal.
* The time from zero to peak steering is ca. 100 ms for angles > 0 and ca. 160 ms for angles < 0.
* At large steering angles, the peak torque occurs clearly after the peak steering angle. This I assume is because of the large kinetic energy of the car when oscillating. It is also interesting to compare with the first oscillation of around 45 degrees, where the torque peak is more aligned with peak steering angle. Notice that iR and rF2 behaves pretty equal for similar steering angles, which is good (assuming the steering ratio and other car factors are similar)
As the FFB output and steering wheel position sampling is done @60 Hz in iR (once every 16.7 ms), in the 100 ms zero to peak time iR is able to read out steering wheel position and update the FFB output around six times while the steering wheel goes from zero to peak steering angle in the above oscillation. That is significantly less than the 25 times of rF2, even though the oscillation frequency in rF2 is twice that of iR.
In iR, we can also see that at peak steering wheel speed, the steering wheel moves as much as 30 degrees between two steering wheel position samples by iR. That is around 20% of the total zero to peak range for the oscillation I looked at.
We also observe e.g. a torque output change of 11.5 Nm between two consecutive outputs, which is ca. 38% of the total zero to peak range for the oscillation I looked at.
Comparing this to rF2, steering changes ca. 6% between two steering wheel position samples. The figure for force is 8%.
For the driver, the lower consecutive change figure for the FFB output in rF2 (8% vs. 38% in iR) results in a smoother feeling. Also the higher FFB output rate of rF2 helps smoothness.
Now, let us take a look at a sequence of normal straight line driving in both rF2 and iR:
Notice the difference in wheel movement from center between rF2 and iR. The movements originate from forces generated by hitting bumps in the track. As you can see, these forces are greater in iR than in rF2. One can argue that it is because of more bumps in the iR version of Lime Rock or differences between the cars, but in my experience what the above clip shows is representative for the general difference in steering force generated from bumps between rF2 and iR.
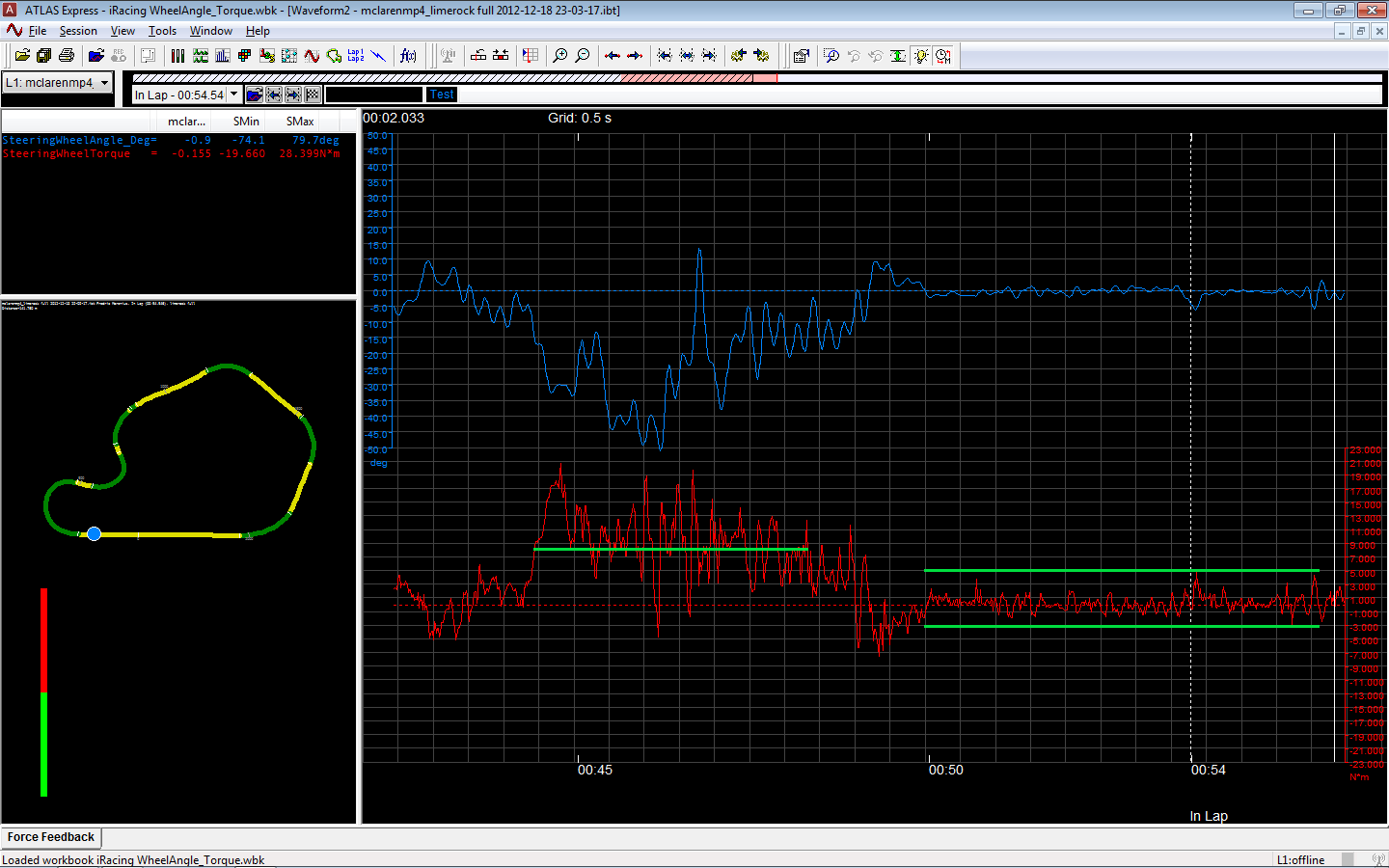
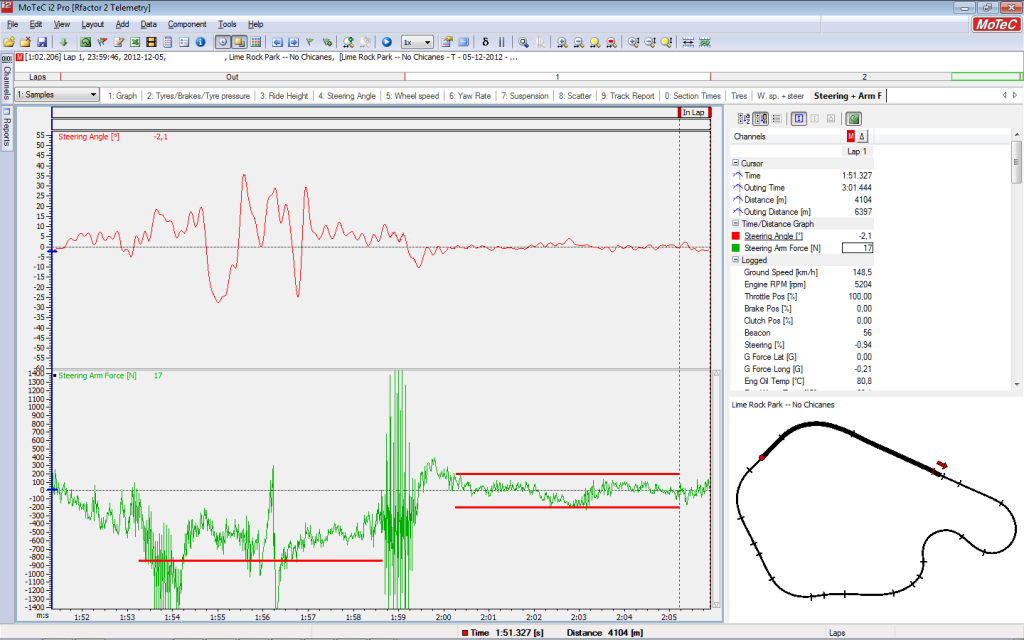
Let us study the above normal straight line driving by looking at telemetry including the above sequences in rF2 and iR. First rF2 (click for larger size):

With the red lines I have marked 1: the approx. average force produced by going through the corner leading out on to the s/f straight and 2: the peak force generated by going in a straight line.
You can see that the peak force of going down the straight is about 25% of the average force produced by going through the corner.
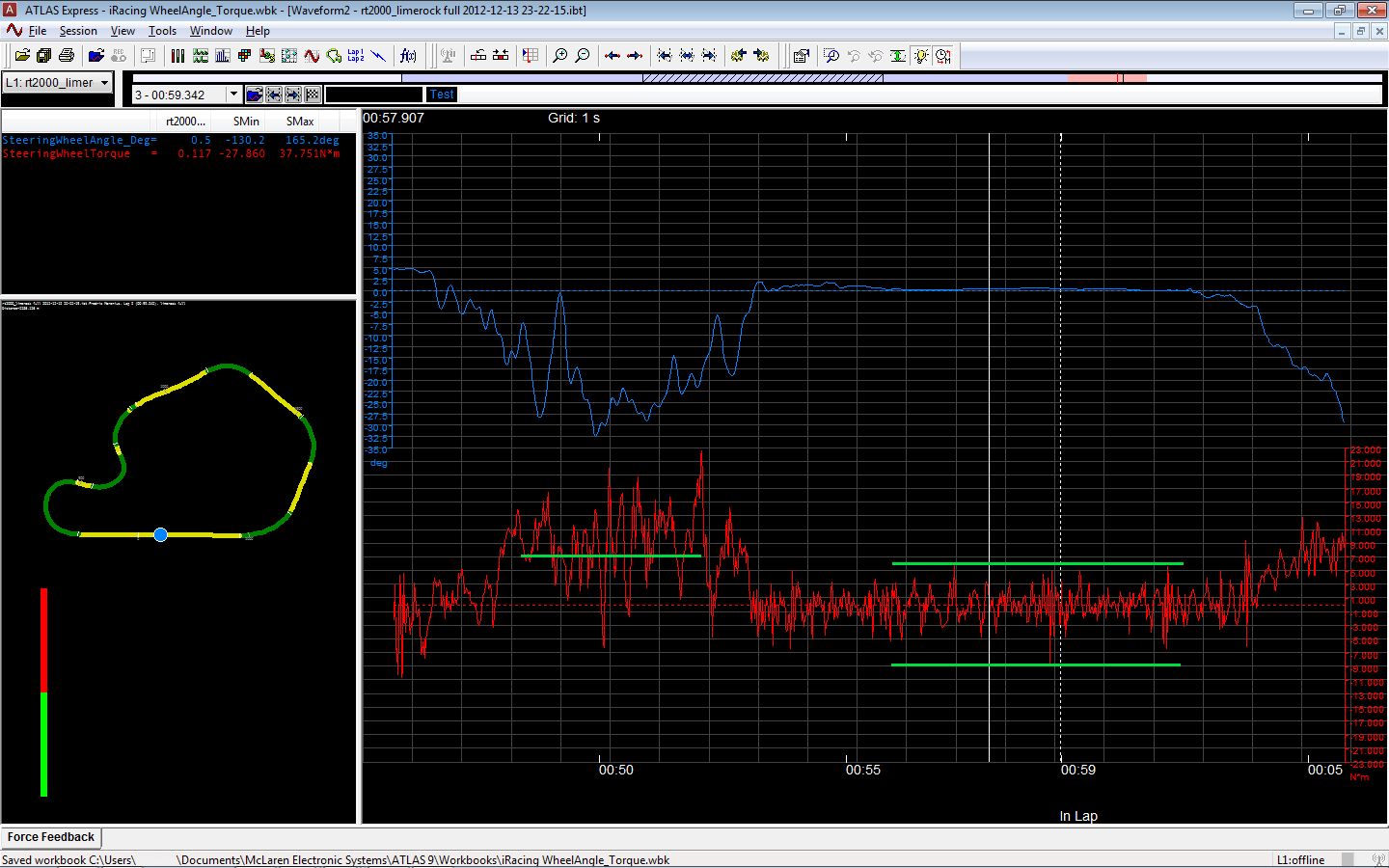
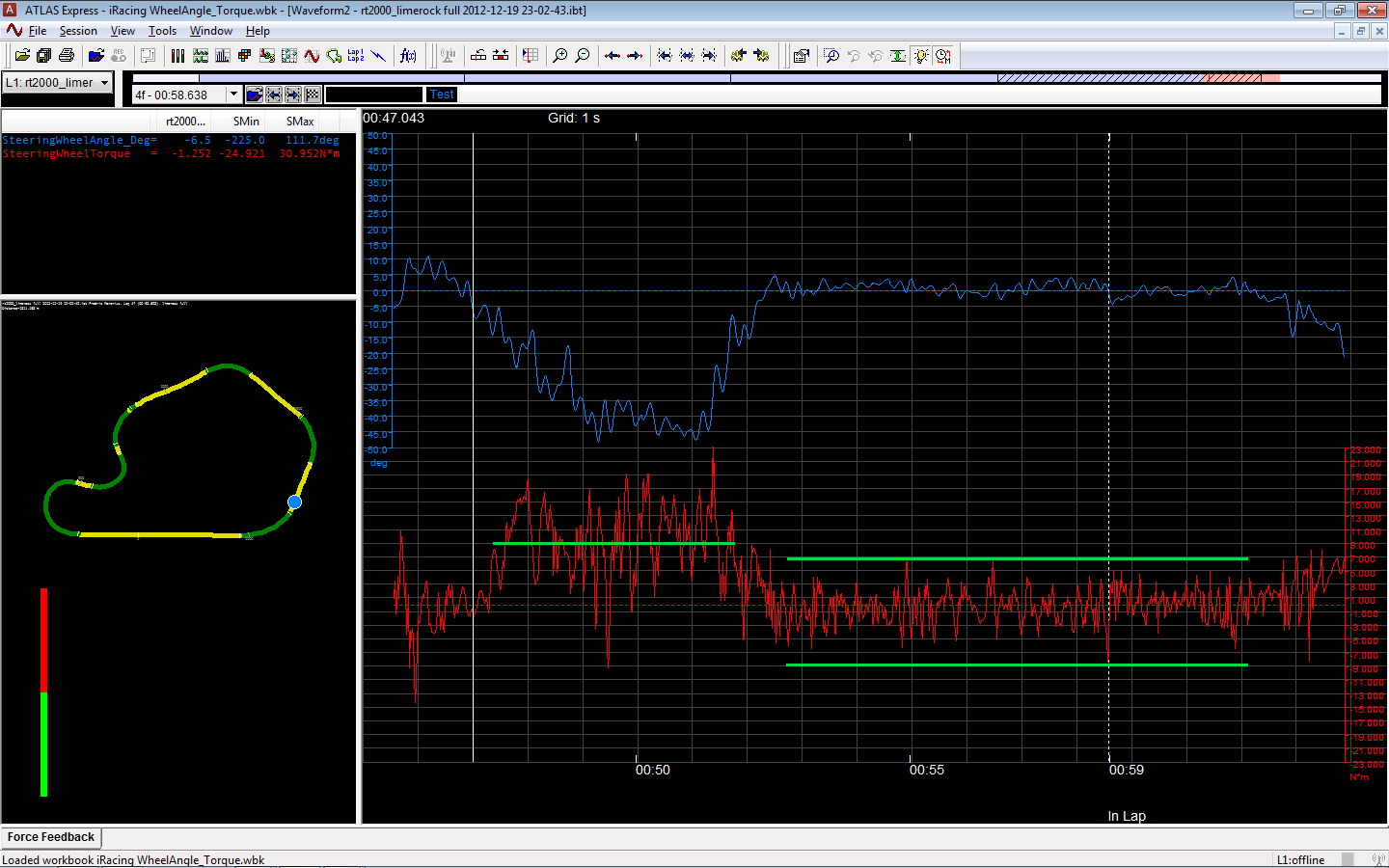
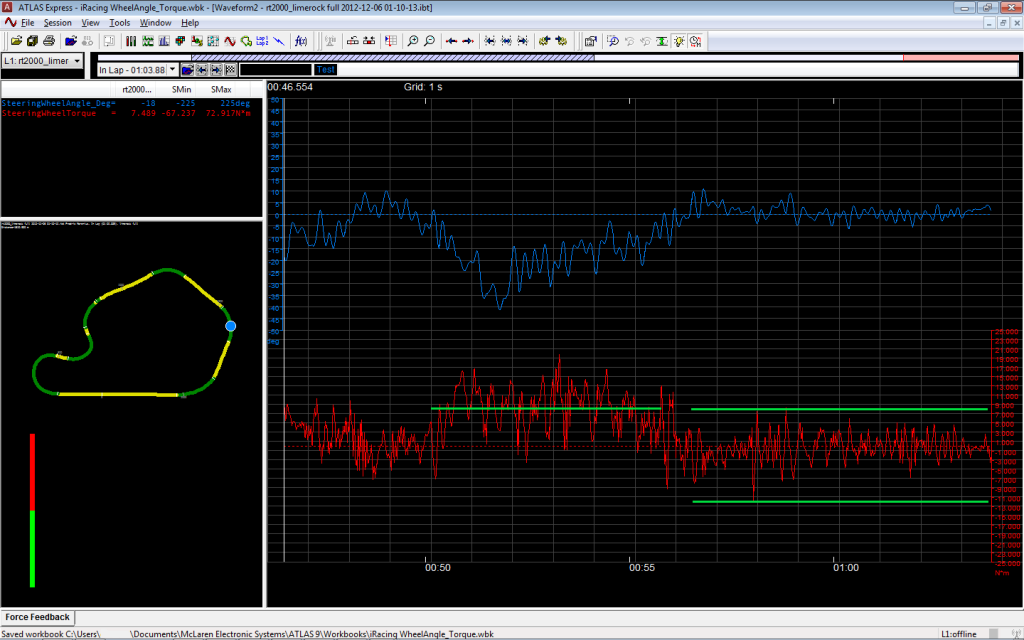
Now let us study the same in iR (click for larger size):

As you can see, in iR the situation is radically different; the peak torque of going down the straight is about 135% of the average torque produced by going through the corner. This is just an example of course and not the definite truth, but in my experience it well represents one aspect of the FFB differences between rF2 and iR.
--------------------
So, in conclusion, what do the above findings mean then?
* As shown above, the higher FFB output rate of rF2 gives a smoother FFB output, which can also be felt by less steering wheel jerkiness.
* In my opinion, rF2 clearly gives the better balance between steering wheel torque going through corners and torque generated by going over bumps.
* rF2 has a more stable FFB behavior, which was also shown in the oscillation tests above.
In addition, not shown in the above tests:
* The advanced tire model of iR gives a very nice elasticity to the tires which can be felt in the FFB. In this area iR performs better than rF2 in my opinion.
* The framerates in iR were 3-4 times(!) higher in iR than in rF2 while doing the above tests. In addition to that, iR looked (much) better and crisper overall. Here, ISI has massive work to do to be up to par with iR.
That's it for this little analysis, thanks for reading!
I posted the below analysis over at iRacing the other day, and I thought I'd repost it here for anybody not a member over there:
------------------------------
With ISI releasing the Skip Barber formula car, there is opportunity to compare rFactor2 with iRacing using reasonably similar input. In this post I take a look at the FFB output characteristics of the rFactor2 Skip Barber Regional and compares it to the iRacing Skip Barber RT2000. Both are driven at Lime Rock Park.
The main purpose of this comparison is to try to demonstrate the rather different FFB output of iRacing (iR) and rFactor2 (rF2) respectively. The difference in feeling is substantial, and it is demonstrated below. In addition to videos, I will also analyze telemetry output from the video recorded runs to try to further shed some light on what is happening and why.
All tests were carried out using a Leo Bodnar wheel (with a Frex paddle shifter unit attached). The FFB output of the sims are set not to clip. Unfortunately it is not really possible to have a 1:1 match of the effective FFB output to the wheel from iR and rF2 respectively. I did however try to set the FFB torque output so that the generated torque going through corners were of close enough magnitude. The caster of the cars were set to 5.0 (rF2) and 5.2 (iR) degrees.
In iR, "use linear mode" is enabled, FFB strength = 7.0, damping = 0%, min force = 0.0%. Baseline setup is used.
rF2 has a rich set of FFB customization options, so I will not list them all here. I have used the default settings (except for "steering torque per-vehicle mult="0.65000"" and where noted), which are in fact mostly aimed for fidelity. The default setup was used for the rF2 Skip Barber. The "steering torque per-vehicle mult" was reduced from 1.0 to prevent FFB clipping. Unfortunately, in rF2 it is not possible to check for clipping like in iR, so 0.65 is a safe-side guess really. Little known btw is that also rF2 has the ability to control the (linearity) function of the FFB output, but the function is AFAIK not known. The parameter that regulates it is "steering torque sensitivity".
So, with those preliminaries out of the way, let us get going!
First, we take a look at how the Skip Barber behaves in rF2 when going in a straight line without the driver holding the steering wheel:
We can observe a few things in the video:
* It takes about 1.5 seconds from wheel release until the wheel starts to oscillate.
* The oscillation has a ~fixed steady state frequency and magnitude.
The reason for the very start of the oscillation is road bumps, but why does the steady state oscillation occur at all? Is it the way it is supposed to be (at least from how rF2 is designed), or is the oscillation a result of that the rF2 FFB output and steering wheel position sampling rates are not fast enough to stabilize the steering (by the self aligning torque effect)?
To analyze that and come up with a plausible answer, I will have a look at the telemetry data for the above oscillation.
But first, for comparison, I utilized the rF2 capability to enable a host of different canned effects. I chose to enable the static centering spring effect, which is sent to the FFB wheel controller once and the spring effect is then controlled at a high loop rate by the FFB wheel controller itself. (Only Leo Bodnar can in this case answer the question of at exactly how high loop rate
)I used the following centering spring settings:
* spring coefficient="0.20000" // Static spring effect rate (-1.0 to 1.0)
* spring saturation="1.00000" // Static spring effect peak force (0.0 to 1.0)
The comments give reasonable information on the function of each parameter. The coefficient determines the rate of change (the gradient) in force as a function of the distance the wheel has traveled from spring center. The saturation determines the fraction of maximum force the centering spring effect is allowed to output. These descriptions of course only are true provided the centering spring effect is implemented according to the USB-IF recommendation in the FFB controller.
The choice of spring parameter values were not carefully chosen for the test; When looking at them now I think they can easily be set for better results. Here is anyway a video with the above spring parameters set:
We can see that the Bodnar wheel is capable of centering the wheel nicely and prohibit oscillation.
Let us now take a look at the telemetry output of the oscillation sequence from the first video (click for larger size):
* Steering angle > 0 is right turn
* Steering arm force > 0 is pulling the wheel right
We see that the frequency of the oscillation is pretty constant from start, but that it takes around 1.5 second for it to reach its steady state magnitude. To better be able to analyze, here is a detail view of the last part of the oscillation (click for larger size):

We can observe a few basic things:
* The oscillation period is ca. 0.25 seconds (4 Hz)
* The time from zero to peak steering is ca. 63 ms.
As the FFB output and steering wheel position sampling is done @400 Hz in rF2 (once every 2.5 ms), it means rF2 is able to read out steering wheel position and update the FFB output around 25 times while the steering wheel goes from zero to peak steering angle in the above oscillation. That means there is plenty of time for the simulator to have the car behave in an orderly fashion.
So, as it seems the oscillation is according to an ordered state of the sim physics modelling, what happens is probably that the kinetic energy accumulated due to the weight of the car and the fact that it is turning (=accelerating) makes the steering swing over the center from one side to the other. The side forces eventually stops the swing in one direction and starts it in the other. The magnitude of the self aligning torque of the front wheels as a function of steered angle is not enough to counteract this to keep the steering wheel more centered. ...Hm, any proper vehicle dynamics knowledgeable is welcome explain this better...
Now, let us take a look on how the iR Skip Barber behaves in the same situation as in the first video above:
Observations:
* The wheel goes into large magnitude oscillation immediately after wheel release
* The magnitude of the oscillation does not increase very much after start. Also the frequency seems relatively constant.
Here is telemetry output of the oscillation sequence (click for larger size):
* Steering angle > 0 is left turn (opposite of rF2)
* Steering wheel torque > 0 is pulling the wheel left (consequently, opposite of rF2)
Observations:
* The time to full magnitude is indeed lower than in rF2. In iR it is slightly less than one second.
* The steering angle magnitude bottoms out at 225 degrees (the wheel is set to 450 degrees lock-to-lock range). In rF2, the magnitude is smaller, around 50 degrees.
* The oscillation period is ca. 0.5 seconds (2 Hz). Notice here though that left and right oscillations are not equal.
* The time from zero to peak steering is ca. 100 ms for angles > 0 and ca. 160 ms for angles < 0.
* At large steering angles, the peak torque occurs clearly after the peak steering angle. This I assume is because of the large kinetic energy of the car when oscillating. It is also interesting to compare with the first oscillation of around 45 degrees, where the torque peak is more aligned with peak steering angle. Notice that iR and rF2 behaves pretty equal for similar steering angles, which is good
(assuming the steering ratio and other car factors are similar)As the FFB output and steering wheel position sampling is done @60 Hz in iR (once every 16.7 ms), in the 100 ms zero to peak time iR is able to read out steering wheel position and update the FFB output around six times while the steering wheel goes from zero to peak steering angle in the above oscillation. That is significantly less than the 25 times of rF2, even though the oscillation frequency in rF2 is twice that of iR.
In iR, we can also see that at peak steering wheel speed, the steering wheel moves as much as 30 degrees between two steering wheel position samples by iR. That is around 20% of the total zero to peak range for the oscillation I looked at.
We also observe e.g. a torque output change of 11.5 Nm between two consecutive outputs, which is ca. 38% of the total zero to peak range for the oscillation I looked at.
Comparing this to rF2, steering changes ca. 6% between two steering wheel position samples. The figure for force is 8%.
For the driver, the lower consecutive change figure for the FFB output in rF2 (8% vs. 38% in iR) results in a smoother feeling. Also the higher FFB output rate of rF2 helps smoothness.
Now, let us take a look at a sequence of normal straight line driving in both rF2 and iR:
Notice the difference in wheel movement from center between rF2 and iR. The movements originate from forces generated by hitting bumps in the track. As you can see, these forces are greater in iR than in rF2. One can argue that it is because of more bumps in the iR version of Lime Rock or differences between the cars, but in my experience what the above clip shows is representative for the general difference in steering force generated from bumps between rF2 and iR.
Let us study the above normal straight line driving by looking at telemetry including the above sequences in rF2 and iR. First rF2 (click for larger size):
With the red lines I have marked 1: the approx. average force produced by going through the corner leading out on to the s/f straight and 2: the peak force generated by going in a straight line.
You can see that the peak force of going down the straight is about 25% of the average force produced by going through the corner.
Now let us study the same in iR (click for larger size):
As you can see, in iR the situation is radically different; the peak torque of going down the straight is about 135% of the average torque produced by going through the corner. This is just an example of course and not the definite truth, but in my experience it well represents one aspect of the FFB differences between rF2 and iR.
--------------------
So, in conclusion, what do the above findings mean then?
* As shown above, the higher FFB output rate of rF2 gives a smoother FFB output, which can also be felt by less steering wheel jerkiness.
* In my opinion, rF2 clearly gives the better balance between steering wheel torque going through corners and torque generated by going over bumps.
* rF2 has a more stable FFB behavior, which was also shown in the oscillation tests above.
In addition, not shown in the above tests:
* The advanced tire model of iR gives a very nice elasticity to the tires which can be felt in the FFB. In this area iR performs better than rF2 in my opinion.
* The framerates in iR were 3-4 times(!) higher in iR than in rF2 while doing the above tests. In addition to that, iR looked (much) better and crisper overall. Here, ISI has massive work to do to be up to par with iR.
That's it for this little analysis, thanks for reading!